
新型仿生机器人揭开蜥蜴攀爬奥秘!四肢配合扭转才能抓稳墙壁
备用题目:
新型蜥蜴机器人模仿攀爬运动,兼顾速度与稳定有诀窍
澳洲团队研发蜥蜴机器人,垂直攀爬又快又稳的奥秘
智东西(公众号:zhidxcom)
编译 | 屈望苗
编辑 | Panken
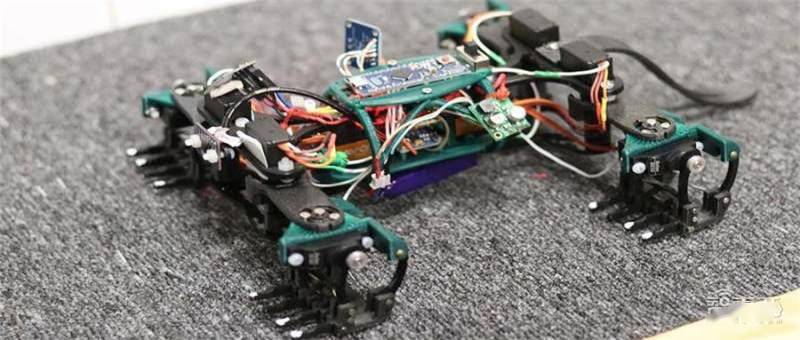
智东西3月31日消息,据外媒NewScientist今日报道,澳大利亚阳光海岸大学的Christofer Clemente和他的团队研发出一款体长约24厘米的仿生蜥蜴机器人。
该机器人或可用于揭示蜥蜴等爬行动物的运动原理。本研究中,研究人员通过比较仿生机器人与真实蜥蜴的运动状态,揭示了蜥蜴进行垂直攀爬运动的两大要领:四肢、脊椎配合移动,保持适宜的移动速度。
这项研究已经发表在英国皇家学会(Royal Society)网站上,论文题目为《使用仿生攀爬机器人来探索蜥蜴攀爬的表演景观(Using a biologically mimicking climbing robot to explore the performance landscape of climbing in lizards)》
论文链接:
https://doi.org/10.1098/rspb.2020.257
一、前后肢配合旋转,抓墙更稳
Clemente团队将蜥蜴机器人与家中壁虎、澳洲水龙等真正的蜥蜴放在一起,进行垂直攀爬测试,并将整个过程拍摄下来进行分析。
测试发现,当蜥蜴机器人的前肢向外旋转20度,后肢向外旋转100度时,它可以稳稳地待在墙上。当它的四肢以同样的角度向内旋转时,也同样可以在墙面上保持稳定。而据Clemente描述,在自然界中蜥蜴的四肢只能以这个角度向外旋转。
他们还发现,当蜥蜴机器人结合四肢和脊柱运动时,它可以爬得最远。虽然脊柱只能做弯曲50度左右的旋转运动,只旋转脊柱也可以使机器人移动,但肢体的大量运动配合脊椎的少量运动才是最有效的方式。
二、爬升速度适中,距离更远
研究发现,无论对蜥蜴还是机器人,控制适当的速度都是增加竖直爬行距离的有效方法——既不要太快,也不要太慢。
在测试中,当机器人爬升速度超过其最高速度的70%或低于最高速度的40%时,它都有一半的几率会掉下来。在这个区间里有一个最佳位置,使它保持在墙上不掉下来。而实际的蜥蜴通常以它们最大奔跑速度的60%到80%爬升,以保持它们对墙壁的抓地力。
结语:关注自然,会带来新技术的启迪
在古老的时代,诸如蝾螈的陆生四足动物只能通过脊椎的旋转来移动,而随着进化的进程,现代爬行动物找到了更适合攀爬的动作。或许,进化和仿生机器人的研发有着相似的进程,朝着相似的方向发展。
正如Clemente所说:“要制造更高效的机器人,我们首先应该关注自然。”

内容来自网友分享,若违规或者侵犯您的权益,请联系我们
所有跟帖: ( 主贴楼主有权删除不文明回复,拉黑不受欢迎的用户 )
进入内容页点击屏幕右上分享按钮
楼主前期社区热帖:
- 结核病患者贫血该咋办?真正能补血的食物是…… 04/28/24
- 常吃西红柿,有2大好处 04/28/24
- 蜀宴赋丨醉春赏味,赴一场料峭春风宴 04/28/24
- 上海必点的6道沪菜,想不到是“沪菜之魂”,老板以为你是上海人 04/28/24
- “凿壁偷光”的匡衡 04/28/24
- 10副智慧对联:人乐百年寿 ,家和万事兴 04/28/24
- 历史上人们为何会改姓 04/28/24
- 2024国窖1573天府名宴正式启幕,川菜川酒共谱美食华章 04/27/24
- 为什么泸州大河街要从宋文化开始?老街最好的保护,是活化利用 04/27/24
- 唐诗里的春天,拂堤杨柳醉春烟 04/27/24
- 《小窗幽记》:福祸相依,凡事有度 04/27/24
- 宋朝为何才女辈出 04/27/24
- 广西59岁大爷天天吃素,坚持了30多年,结果让医生无比惊讶! 04/26/24
- 4种鱼已被列入“致癌名单”,吃多了致癌,是真是假?告诉你真相 04/26/24
- 《资治通鉴》8句经典,读懂古人的智慧宝藏 04/26/24
- 心若年轻花自开,无惧岁月催人老 04/26/24
- 太医院,古代最高的医政管理机构 04/26/24
- 【文史英华】刘沅《拾余四种》述略‖任蕴奇 04/24/24
- 城中桃李愁风雨,春在溪头荠菜花 04/24/24
- 饮茶贵新,欧阳修这首诗写出了春茶的美妙 04/24/24
>>>>查看更多楼主社区动态...