
400米2分34秒破纪录 伯克利双足机器人接管人类
400米2分34秒破纪录 伯克利双足机器人接管人类来源:新智元UC伯克利的双足机器人,400米直接跑进了2分34秒,这个速度属实是超越不少人类了。而背后的RL通用框架,让它无论是站立,还是跑步、跳高、跳远,动作都十分丝滑。
UC伯克利的双足机器人,跑步又破纪录了!
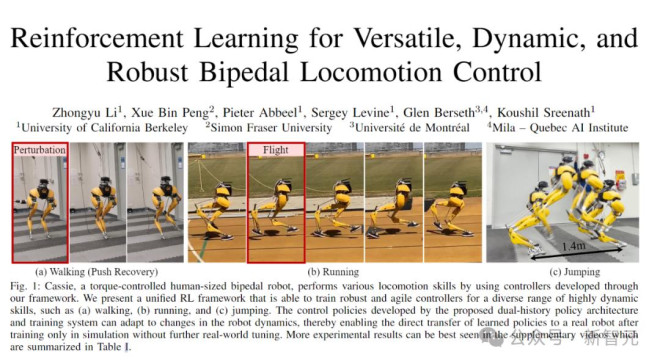
最近,HYBRID ROBOTICS研究团队的Cassie,给我们来了一段惊艳的表演——
以2分34秒的成绩,跑完了400米!
随后,它又在不需要额外训练的情况下,完成了1.4米的跳远。
是的,相信你已经注意到了,它的外形十分独特——只有下半身!
没错,跑步什么的,要上半身干啥。
400米冲刺脚下生风
没有腿意味着什么?当然是——速度就是一切!
一声令下,Cassie就开始跑400米了。
只见它两脚生风,脚步敏捷。
就是,不知道脚下这双跑鞋有没有速度加成?
可以看到,Cassie的跑步姿势十分标准,没有任何累赘的动作。
而研究人员则全程跟在后面陪跑。
现在,Cassie在做最后的冲刺,它集中精力一鼓作气,一跃而冲过了终点线。
它最后的成绩是——2分34秒!
这个成绩,或许已经超越了不少人类。
算起来,Cassie的步速是每分155.6米。
在21年,Cassie在中途不充电的条件下,完成了5公里的户外长跑,用时53分钟,这个步速是每分94.3米。
这个进步是肉眼可见的。
Cassie是利用神经网络强化学习进行训练的,因此,它可以从头掌握简单的技能,比如原地跳跃、向前走或跑而不摔倒。
它被孤立模仿人体动捕的数据,和动作的演示动画。
最后,团队还测试了Cassie的跳远能力,注意,这是在它没有经过额外训练的情况下。
它的成绩是1.4米。
RL通用框架,跑步、跳高、跳远多才多艺
Cassie怎么这么强?
我们在这篇发表于1月底的论文中,找到了答案。
论文地址:https://arxiv.org/pdf/2401.16889.pdf
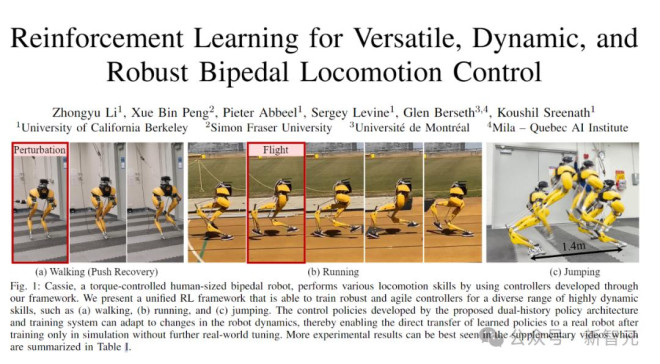
利用深度强化学习(RL),研究者为双足机器人创建了动态运动控制器。
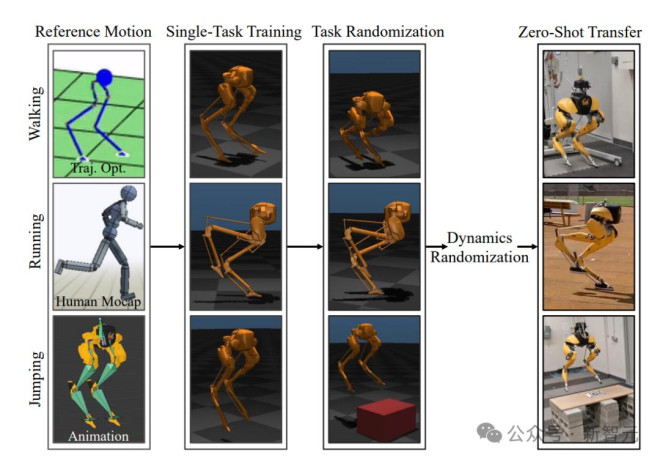
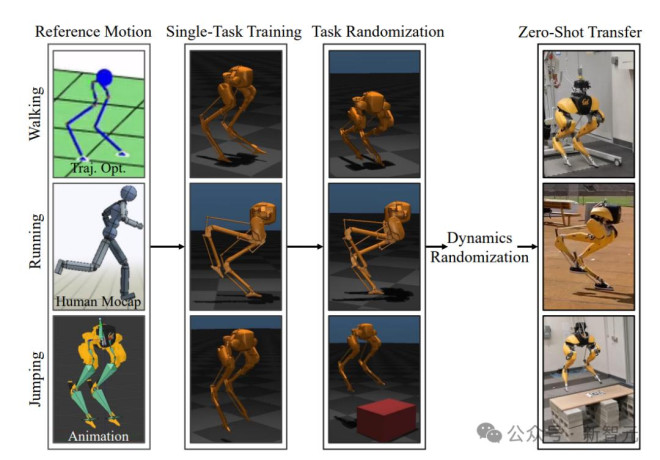
他们开发出了一种通用控制解决方案,可用于一系列动态双足技能,比如周期性行走,跑步,以及非周期性的跳跃和站立。
这个通用控制框架,可以实现各种周期性和非周期性的双足运动技能
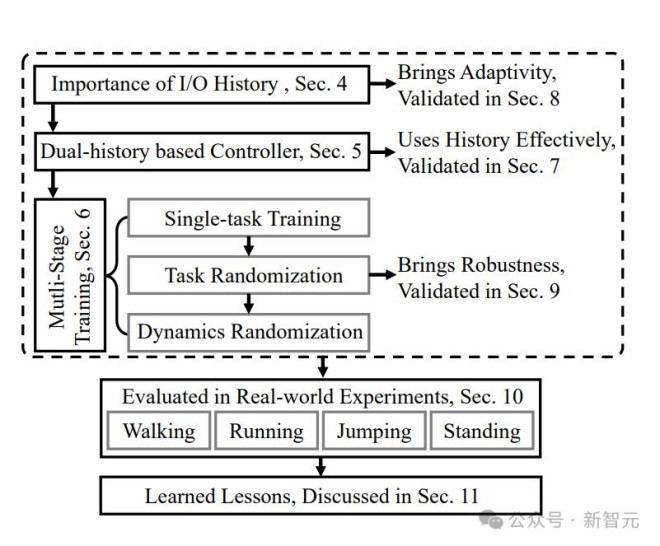
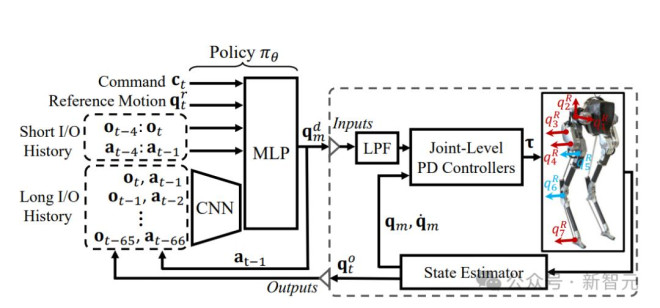
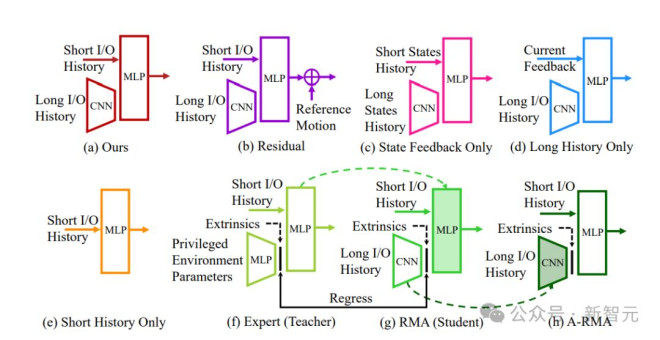
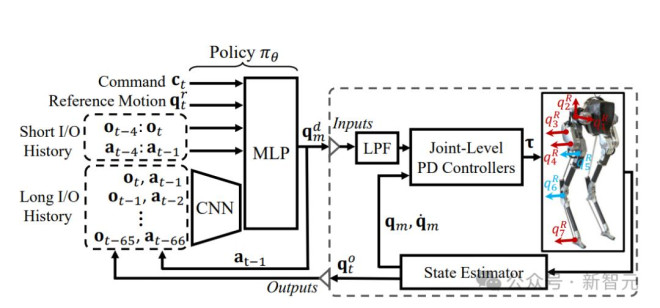
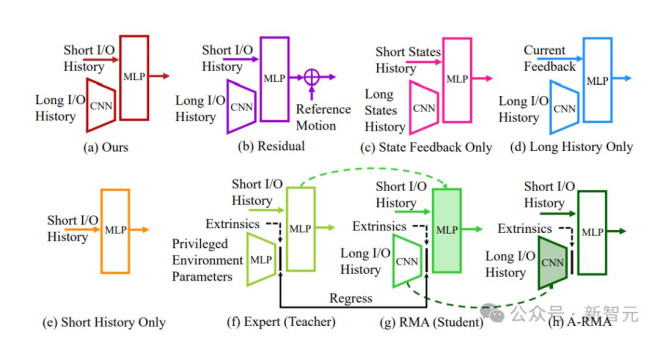
基于强化学习的控制器,他们采用了新颖的双历史架构,利用了机器人的长期和短期输入/输出(I/O)历史。
当通过端到端强化学习方法进行训练时,这种控制架构在模拟和现实世界中的各种技能上,都始终优于其他方法。
另外,RL系统还引入了适应性和鲁棒性。
可以证明,通过有效利用机器人的I/O历史记录,架构就可以适应各种变化,如接触事件。
鲁棒性的另一个关键来源,就是任务随机化。
因此,我们就看到了Cassie的各种运动技能。比如稳稳地站立,多才多艺地步行,快速跑步,以及各种跳高和跳远。
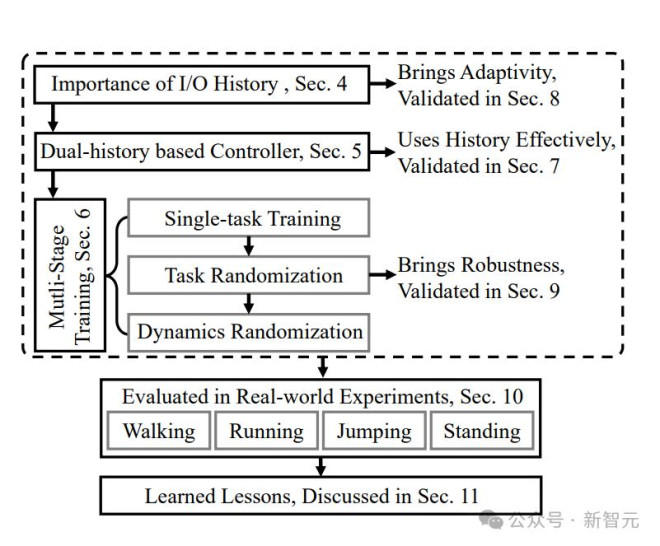
这个研究所基于RL的控制器架构如下图,它利用了机器人的输入和输出(I/O)的双重历史记录。
利用这个多阶段的训练框架,就可以获得零样本转移到现实世界的通用控制策略。
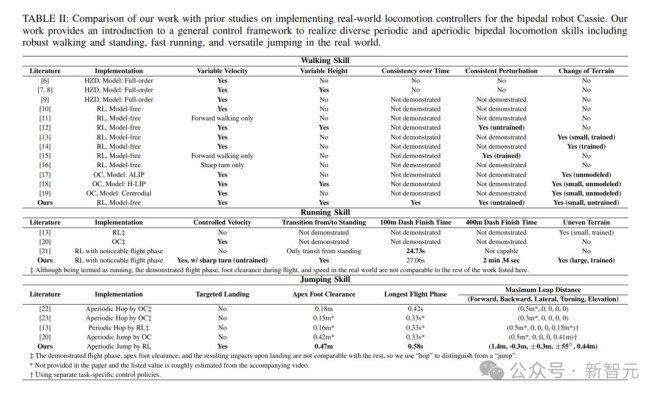
如下是基于RL的双足机器人运动控制策略架构各种基线的图示。
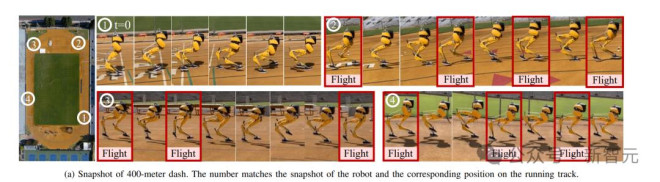
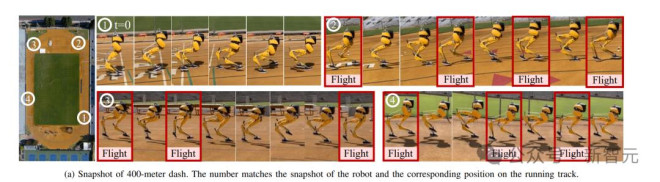
利用研究者开发的多功能跑步策略,Cassie成功完成了400米冲刺。
这个过程是使用单一跑步策略完成的。
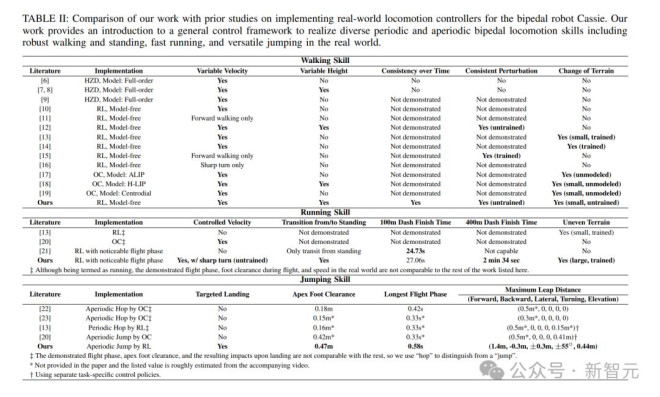
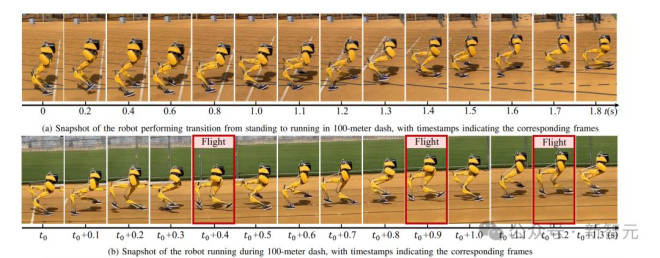
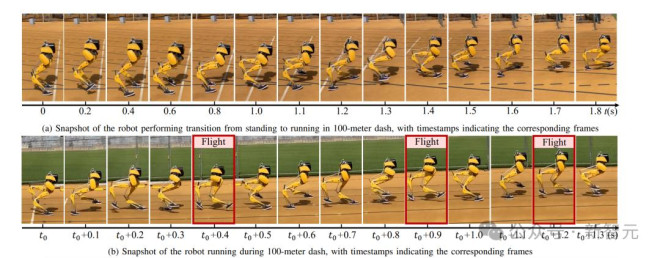
它使得机器人能够从站立姿势转变为平均2.15m/s和峰值3.54m/s的快速跑步步态。
使用微调的跑步策略,Cssie还以快速的跑步步态完成了100米短跑。
用训GPT的方法,训出人形机器人
400米2分34秒破纪录,伯克利双足机器人“接管”人类
新智元·2024-03-26 06:05
关注
用训GPT的方法,训出人形机器人
UC伯克利的双足机器人,400米直接跑进了2分34秒,这个速度属实是超越不少人类了。而背后的RL通用框架,让它无论是站立,还是跑步、跳高、跳远,动作都十分丝滑。
UC伯克利的双足机器人,跑步又破纪录了!
最近,HYBRID ROBOTICS研究团队的Cassie,给我们来了一段惊艳的表演——
以2分34秒的成绩,跑完了400米!
随后,它又在不需要额外训练的情况下,完成了1.4米的跳远。
是的,相信你已经注意到了,它的外形十分独特——只有下半身!
没错,跑步什么的,要上半身干啥。
400米冲刺脚下生风
没有上半身意味着什么?当然是——速度就是一切!
一声令下,Cassie就开始跑400米了。
只见它两脚生风,脚步敏捷。
就是,不知道脚下这双跑鞋有没有速度加成?
可以看到,Cassie的跑步姿势十分标准,没有任何累赘的动作。
而研究人员则全程跟在后面陪跑。
现在,Cassie在做最后的冲刺,它集中精力一鼓作气,一跃而冲过了终点线。
它最后的成绩是——2分34秒!
这个成绩,或许已经超越了不少人类。
算起来,Cassie的步速是每分155.6米。
在21年,Cassie在中途不充电的条件下,完成了5公里的户外长跑,用时53分钟,这个步速是每分94.3米。
这个进步是肉眼可见的。
Cassie是利用神经网络强化学习进行训练的,因此,它可以从头掌握简单的技能,比如原地跳跃、向前走或跑而不摔倒。
它被鼓励模仿人体动捕的数据,和动作的演示动画。
最后,团队还测试了Cassie的跳远能力,注意,这是在它没有经过额外训练的情况下。
它的成绩是1.4米。
RL通用框架,跑步、跳高、跳远多才多艺
Cassie怎么这么强?
我们在这篇发表于1月底的论文中,找到了答案。
论文地址:https://arxiv.org/pdf/2401.16889.pdf
利用深度强化学习(RL),研究者为双足机器人创建了动态运动控制器。
他们开发出了一种通用控制解决方案,可用于一系列动态双足技能,比如周期性行走,跑步,以及非周期性的跳跃和站立。
这个通用控制框架,可以实现各种周期性和非周期性的双足运动技能
基于强化学习的控制器,他们采用了新颖的双历史架构,利用了机器人的长期和短期输入/输出(I/O)历史。
当通过端到端强化学习方法进行训练时,这种控制架构在模拟和现实世界中的各种技能上,都始终优于其他方法。
另外,RL系统还引入了适应性和鲁棒性。
可以证明,通过有效利用机器人的I/O历史记录,架构就可以适应各种变化,如接触事件。
鲁棒性的另一个关键来源,就是任务随机化。
因此,我们就看到了Cassie的各种运动技能。比如稳稳地站立,多才多艺地步行,快速跑步,以及各种跳高和跳远。
这个研究所基于RL的控制器架构如下图,它利用了机器人的输入和输出(I/O)的双重历史记录。
利用这个多阶段的训练框架,就可以获得零样本转移到现实世界的通用控制策略。
如下是基于RL的双足机器人运动控制策略架构各种基线的图示。
利用研究者开发的多功能跑步策略,Cassie成功完成了400米冲刺。
这个过程是使用单一跑步策略完成的。
它使得机器人能够从站立姿势转变为平均2.15m/s和峰值3.54m/s的快速跑步步态。
使用微调的跑步策略,Cssie还以快速的跑步步态完成了100米短跑。
用训GPT的方法,训出人形机器人
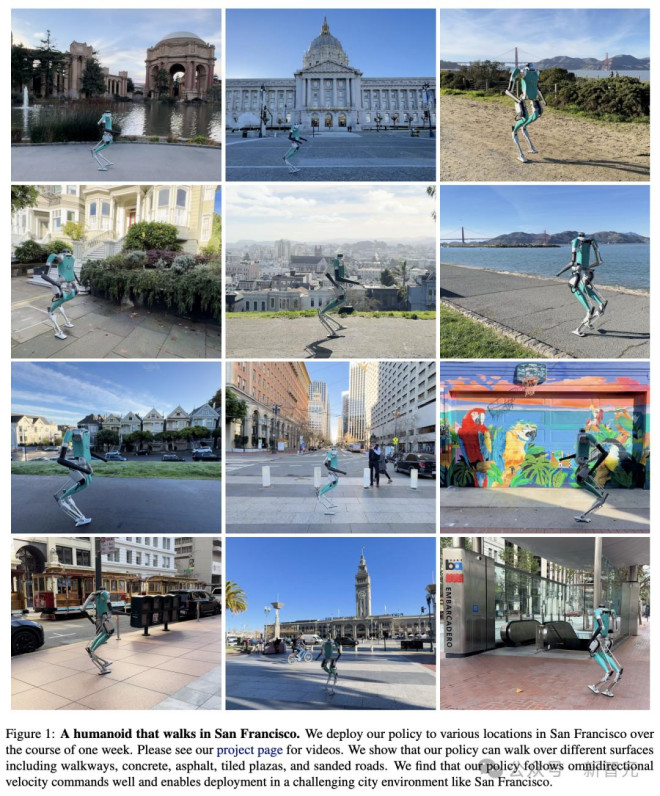
机器人接管旧金山?
在今年1月,UC伯克利的人形机器人显眼包“小绿”,就曾经大规模引起了人们的注意。
那时它长这样——
看着挺好,就是没脖子。
只见它在围观人群的惊叹声中,大摇大摆地走出UC伯克利校门。
在操场草坪上,跟大爷一样练习倒步走。
身影遍布UC伯克利校园的各个角落。
甚至引起网友惊呼:机器人接管旧金山了?
预测下一个动作,控制人形机器人行走
不久后,就在2月底,UC伯克利就发表了一篇重磅论文,介绍“小绿”是怎么训练出的。
论文地址:https://arxiv.org/pdf/2402.19469.pdf
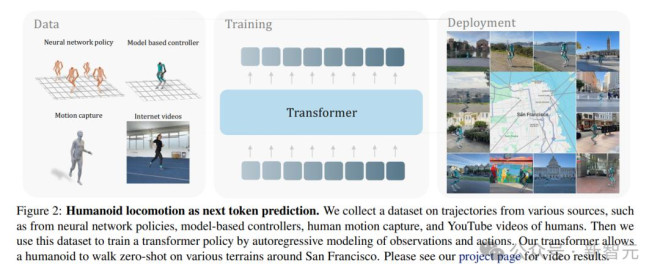
在这篇论文中,他们介绍了训练人形机器人的方法——跟训练GPT的方法是一样的。
用这种训练GPT的方法,研究者成功地训练出了人形机器人的类人运动。
重点就是:通过预测下一个动作,来控制人形机器人的行走。
人体运动作为下一个token预测
在一系列模拟轨迹上,他们对模型进行了训练。
而这些轨迹,来自之前的神经网络策略。
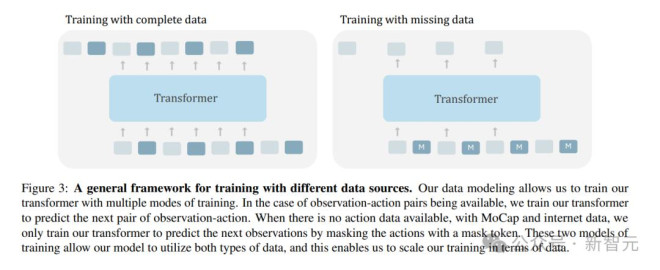
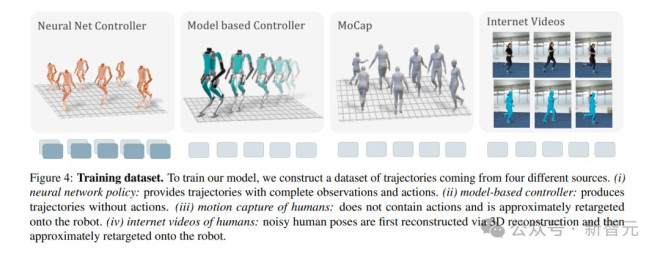
使用不同数据源进行训练的通用框架
人形机器人所学习的,就是基于模型的控制器、动捕数据和YouTube上的人类视频。
训练数据集的4个来源
结果,这个模型能让全尺寸的人形机器人在完全未经训练的情况下,直接完成行走!
仅仅用了27个小时的训练,模型就能在现实世界中泛化了。
而训练过程中从未见过的指令,机器人也能应对。
从此,机器人可以学习真实世界的控制任务了。
参考资料
https://arxiv.org/abs/2402.19469
https://arxiv.org/abs/2401.16889








内容来自网友分享,若违规或者侵犯您的权益,请联系我们
所有跟帖: ( 主贴楼主有权删除不文明回复,拉黑不受欢迎的用户 )
进入内容页点击屏幕右上分享按钮
楼主前期社区热帖:
- 人类有可能就生活在一个超级黑洞里面 04/26/24
- 不现实,很荒谬?马斯克的火星计划遭天文学家质疑 04/26/24
- 拜登政府斥资110亿美元 投入芯片研发领域 04/26/24
- 马斯克的xAI以180亿估值融资60亿,知名资本也入局 04/26/24
- 俄罗斯美女,竟然是MADE IN CHINA 04/26/24
- 刷新认识:我们所在的宇宙是个空洞 04/23/24
- 美军AI自动驾驶F-16 空中缠斗真人飞行员 04/23/24
- 黄仁勋最新研判:未来人形机器人将成主流 04/23/24
- 当我们在馋AI功能时 厂商已经开始馋用户的身子了 04/22/24
- 我用AI开咖啡馆 投入10万 月入6万 04/22/24
- 偶遇1.0伏特的纪念馆🧟♂️ 04/08/24
- 防中俄 美英签AI合作新协定 04/02/24
- 即使Windows10明年淘汰 也没人升级 04/02/24
- OpenAI放开限制,无需注册即可使用ChatGPT 04/02/24
- 老司机雀跃!马斯克要干啥?X测试“上班不宜” 04/02/24
- 美巨头欲降低对中国依赖,转向墨西哥生产AI硬件 04/02/24
- 1000亿豪赌微软OpenAI打造星际之门AI超算 04/02/24
- 马斯克:AI有20%的可能性毁灭人类 04/02/24
- 70年一遇 “恶魔”彗星要来了 肉眼可见 04/02/24
- 超有用 6个热门AI生成工具省时省力 04/02/24
>>>>查看更多楼主社区动态...